 ЦНЬЈШШЯп
ЦНЬЈШШЯп





ЛњЦїШЫКИНг
зЂЃКБОЮФеТЮФзжЃЌЭМЦЌВПЗжРДздЭјТч
АцШЈЙщдзїепЃЌЧжЩОЁЃ
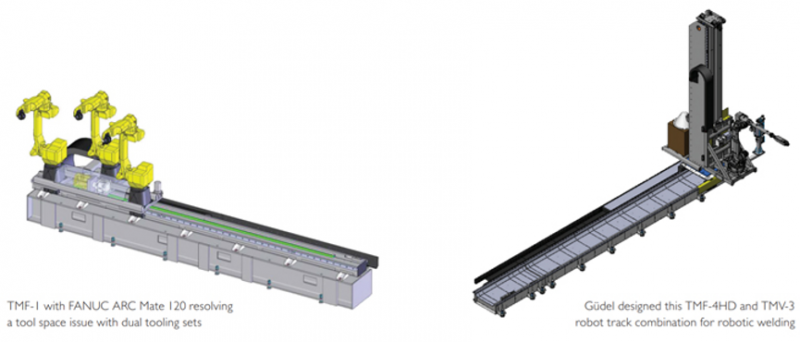
дкГЕМфОРэАВзАЛњЦїШЫКИНгКЭСЌНгЯЕЭГжЎЧАЃЌЫћУЧгІИУСЫНтЦфзщМўЃЌЙІФмвдМАЫќУЧгыКИНггІгУвдМАвЛАуЛњЦїШЫздЖЏЛЏШЮЮёЕФЙиЯЕЁЃ
ЯШНјЕФЧщБЈ
ПиМўЃЌЭЈбЖЙЄОпКЭВйзїдБНчУцзщМўЪЧздЖЏЛЏЯЕЭГжаЯрЛЅЙиСЊЕФЙиМќзщМўЁЃЯЕЭГПижЦАќРЈЛњЦїШЫПижЦЦїКЭЦфЫћЯЕЭГПижЦЦїЃЌР§ШчPLCКЭPCЁЃЭЈГЃЃЌЛњЦїШЫПижЦЦїЕФШЮЮёЪЧжИЕМЛњЦїШЫЙЄОпВЂЬсЙЉЛњЦїШЫдЫЖЏЃЌЖјЯЕЭГПижЦЦїдђЭЈЙ§ЪфШыКЭЪфГіРДЬсЙЉТпМЃЌвдНјаажюШчСуМўвЦЖЏЃЌгыЩњВњЛЗОГЕФЭЈаХЃЌЯЕЭГЪ§ОнЛёШЁКЭШЫЛњНчУцЕШЪТМўЁЃ

ВйзїдБНчУцЬсЙЉСЫНјШыИїжжПижЦЦїЙЄзїзДЬЌЕФДАПкЁЃетЪЧЙЄГЇШЫдБШчКЮВщПДЯЕЭГзДЬЌЕФЗНЗЈЃЌВЂЧвЪЧЪфШыШЮКЮЭтВПЦєЖЏЕФЙ§ГЬаоИФЕФЗНЗЈЁЃВйзїдБНчУцЩшМЦжаЕФПМТЧвђЫиАќРЈЯЕЭГШЫдБЕФВЮгыГЬЖШЃЌММЪѕШЫдБЕФММФмЫЎЦНЃЌдкЛњЦїШЫЖдЦфНјааДІРэжЎЧАЫљашЕФШЮКЮСуМўжЪСПЪфШыОіЖЈвдМАЯЕЭГашвЊВйзїдБИЩдЄЪБЕФЫљашЭЈжЊЁЃ
ЦфЫћЙиМќзщМўЛЙАќРЈАВШЋЯЕЭГзщМўЃЌР§ШчШЫдБЗРЛЄРИЃЌМьаоУХЃЌУХПЊЙиЃЌвтЪЖаХБъЃЌПижЦЯЕЭГСЊЫјзАжУКЭБъХЦЁЃЛљгкЛњЦїШЫЕФздЖЏЛЏЯЕЭГЕФЭтЮЇЩшБИЃЈР§ШчЛњЦїШЫЬсЩ§АхЛђжЇМмЃЌгУгкСуМўеЙЪОЕФзЊХЬКЭЪфЫЭЛњЃЌСуМўЙЬЖЈзАжУЃЌЙЄОпКЭЬзСЯЃЉЖМЪЧЛљгкЛњЦїШЫЕФздЖЏЛЏЯЕЭГЕФвЛВПЗжЃЌИУЯЕЭГгажњгкНЋЛњЦїШЫСЌНгЕНЦфЛЗОГЃЌАќРЈНј/ГіВњЦЗЁЃ
дНРДдНЯИ
ОЁЙмжюШчПижЦЦїКЭНгПкжЎРрЕФЯЕЭГЮЊЛњЦїШЫКИНгЙЄзїЕЅдЊЬсЙЉСЫДѓФдЕФЖЏСІКЭЭЈбЖЃЌЕЋИїИізщМўВХЪЧЪЙЙЄзїЕЅдЊшђшђШчЩњЕФвЊЫиЁЃЦјЖЏдЊМўЃЌР§ШчЗЇУХЃЌХфМўЃЌПеЦјЙ§ТЫЦїКЭбЙСІДЋИаЦїЃЌгУгкзЅГжЦїжТЖЏКЭВњЩњецПеЁЃетаЉзщМўЛђепдкЛњЦїШЫЙЄОпЩЯЃЈР§ШчдкЮяСЯАсдЫжаЃЉЃЌЛђепдкжТЖЏСуМўЙЬЖЈМаКЭКИНггУецПебЙНєзАжУЪБЪЧБиашЕФЁЃ
РыЩЂДЋИаЦїПЩвдАяжњЛњЦїШЫКЭЦфЫћЯЕЭГЭЈЙ§бщжЄЖЏзїКЭЖЈЮЛСуМўРДМрЪгдЫЖЏПижЦКЭДІРэЯЕЭГЕФНјЖШЁЃШЁЗХгІгУГЬађПЩвдЪЙгУДцдкДЋИаЦїРДШЗЖЈСуМўКЮЪБДІгке§ШЗЕФШЁЗХЮЛжУЃЌВЂЪЙгУСэвЛИіДЋИаЦїРДШЗШЯМаГжЦївбДђПЊВЂзМБИФУЦ№СуМўЁЃЕБЛњЦїШЫвЦЖЏЕНЪАШЁЮЛжУЪБЃЌзЅШЁЦїДЋИаЦїЛсШЗШЯзЅШЁЦївбЙиБедкСуМўЩЯЃЌВЂЧвЙЄОпЩЯЕФСуМўДцдкДЋИаЦїЛсжИЪОСуМўдкзЅШЁЦїжаЁЃ
КИНгЯЕЭГзЈгУзщМў
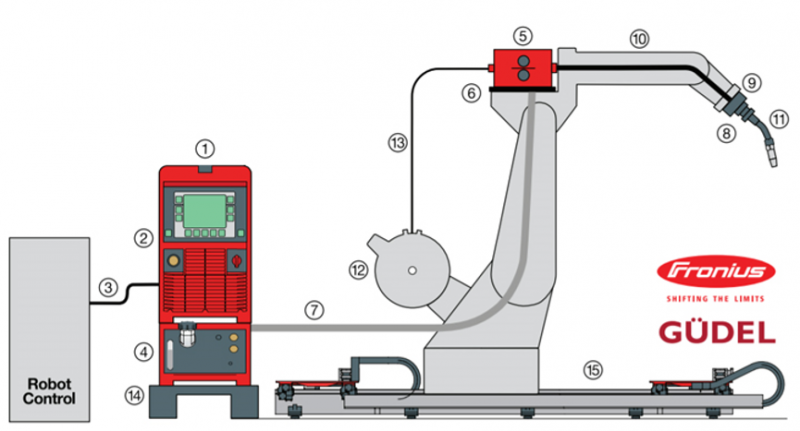
1. КИНгЕчдДЪЧКИНгЯЕЭГЕФКЫаФЁЃЫќЬсЙЉБивЊЕФЙІТЪвдВњЩњШШСПЃЌвддкИюОцЕФФЉЖЫвКЛЏН№ЪєЃЌДгЖјЪЙН№ЪєСуМўСЌНгЃЈКИНгЃЉдквЛЦ№ЁЃ
2. ИУНгПкдЪаэЛњЦїШЫПижЦЦїКЭКИНгЕчдДНјааЭЈаХЁЃетжжГжајЕФЭЈбЖПЩМрЪгКИНгадФмВЂаоИФгАЯьКИНгжЪСПЕФВЮЪ§ЃЌР§ШчЛњЦїШЫЕФБржЏКЭЫйЖШЁЃ
3. НгПкЭЈаХЕчРТНЋКИНгЕчдДСЌНгЕНЛњЦїШЫПижЦЦїЁЃ
4. ЖдгкашвЊЫЎРфИюОцЕФКИНгЃЌашвЊЫЎРфШДЦїЁЃРфШДвКЙмЯпашвЊСЌНгЕНЛњЦїШЫЪжБлВЂДгЭтВПНјаазАЪЮЁЃ
5. ЫЭЫПЛњНЋКИЫПЬсЙЉИјКИЧЙвдНјааКИНгЙ§ГЬЃЌЫќашвЊгыКИНгЕчдДЕФЕчбЙКЭЕчСїФмСІЯрЦЅХфЁЃ
6. ЫЭЫПЛњжЇМмНЋЫЭЫПЛњАВзАЕНЛњЦїШЫЩЯВЂЬсЙЉОјдЕЁЃ
7. ШэЙмАќзАжаАќКЌЫЭЫПЛњЭЈаХЕчРТЃЌгУгкздЦСБЮЯпЕФе§МЋЛђИКМЋЕМЯпЃЌЦСБЮЦјЙмКЭРфШДвКЙмТЗЃЈШчЙћашвЊЃЉЁЃ
8. ЗЂЩњХізВЪБЃЌИюОцЗжРыЦїЛђХізВКаЛсЛњаЕЖЯПЊИюОцЕФСЌНгЁЃ
9. дкИюОцЛђШЮКЮЛњаЕЗжРыЦїгыЛњЦїШЫЩЯЕФЙЄОпАВзААхжЎМфашвЊОјдЕХЬЁЃ
10. ИюОцЕчРТЛђБозгНЋИюОцгыЫЭЫПЛњСЌНгЦ№РДЃЌВЂЬсЙЉИюОцЭЗЪЙгУЕФСЌНгЁЃ
11. КИОцОБЛђЖьОБЙмЪЧЪЕМЪЕФКИОцЁЃ
12. КИЫПжЇМмНЋЩЂзАКИЫПЬсЙЉИјЫЭЫПЛњЃЌвддкКИНгЙ§ГЬжаЯћКФЁЃЕфаЭЕФКИЫПжЇМмЪЧЯпжсаЭЛђЧЙЙмаЭЁЃ
13. АВзАдкКИЫПНјИјЦїКЭКИЫПБЃГжЦїжЎМфЕФКИЫПЙмЕРЮЊКИЫПЬсЙЉСЫЕНДяКИЫПНјИјЦїЕФЙмЕРЁЃ
14. ЕчдДМмгУгкАВзАКИНгЕчдДЁЃ
15. ЯпадЙьЕРЪЙКИНгЛњЦїШЫПЩвдРЉеЙЦфзїгУЗЖЮЇЃЌДгЖјжДааЖрИіЛњЦїШЫЕФЙЄзїЁЃЭМжаЮДЯдЪОИюОцЧхНреОЃЌетЪЧБиашЕФЃЌвђЮЊЛљгкЛњЦїШЫЕФКИНгЯЕЭГЭЈГЃБиаывдЫйЖШЛђНгНќЫйЖШЙЄзїЃЌвђДЫдкКИНгВйзїжЎМфЛжИДЕФЪБМфКмЩйЁЃНЋКИЫПе§ШЗЧхНрКЭаоећЕНе§ШЗЕФЭЛГіЮЛжУПЩШЗБЃУПДЮКИНгОљвдМбЬѕМўПЊЪМЃЌвдЩњВњГіИпжЪСПЕФКИЗьКЭСуМўЁЃ
здЖЏЛЏЯЕЭГвВзмЪЧашвЊЕчЦјзщМўЃЌР§ШчНгЯпКаЃЌБфбЙЦїЃЌЕчЖЏЛњЦ№ЖЏЦїЃЌЭтжсЕчЖЏЛњКЭЧ§ЖЏЦїЃЌвдМАЫљашЕФАВШЋЯЕЭГПиМўЁЃ
МДЪЙЪЧЛњЦїШЫЙЄзїЕЅдЊжаЛљБОЕФзщМўЃЌЖдгке§ГЃдЫааЪБМфвВжСЙиживЊЁЃЙЬЖЈдкЛњЦїШЫЪжБлЩЯЕФЕчРТЃЈГЦЮЊЗѓСЯЃЉБиаыОпгаИпФгадЃЌВЂЧвБиаыВМЯпЃЌвдЪЪгІЛњЦїШЫЕФШЋВПдЫЖЏЁЃЕчдДЯпЃЌЯЕЭГзщМўКЭНгЯпКажЎМфЕФЕчРТЪЧЙЬЖЈЕФЃЌвђДЫВЛашвЊИпШсадЕчРТЁЃЗѓСЯЛЙАќРЈАВзАдкЛњЦїШЫЪжБлЭтВрЕФЦфЫћЮяЦЗЃЌР§ШчЦјЖЏЙмЯпЃЌРфШДЫЎЙмЯпКЭЮяСЯЗжХфШэЙмЁЃКИНгЗѓСЯАќРЈИюОцЕчРТЃЌШэЙмАќзАЃЌКИЫПЕМЙмвдМАдкЛњЦїШЫЪжБлЭтВПбгЩьЕФЫљгаДЋИаЦїЁЃ
РЉДѓЙЄзїЗЖЮЇ
дкЛљгкЛњЦїШЫЕФКИНгЯЕЭГжавЊПМТЧЕФКѓвЛИізщМўЪЧЪЕМЪЕФЛњЦїШЫМАЦфжЇГжЦНЬЈЁЃЭЈГЃИљОнвдЯТШ§ИіЬѕМўбЁдёЛњЦїШЫЃКЗЖЮЇЃЌгааЇдиКЩКЭЫйЖШЁЃдкКИНггІгУжаЃЌБиаыЖдЛњЦїШЫЕФгааЇдиКЩНјааЖюЖЈДІРэЃЌвдДІРэИюОцЃЌЗжРыЦїЃЌОјдЕХЬЃЌЫЭЫПЛњКЭИюОцЕчРТдкЪжБлЩЯЕФИКдиЁЃЛњаЕЪжЕФЗЖЮЇБиаызувдНјааНТНгЃЌВЂДяЕНСуМўЩЯЫљгавЊЧѓЕФКИНгЕуЁЃЛњЦїШЫПижЦЦїашвЊКИНгШэМўЃЌИУШэМўПЩЬсЙЉгыКИНгЕчдДЭЈаХВЂНтЪЭдЫЖЏБфЛЏЕФашЧѓвдгХЛЏКИНгЙ§ГЬЕФЗНЗЈЁЃЫљашЕФЩњВњТЪБиаыАќРЈЛњЦїШЫдкСуМўЩЯжДааЫљгаКИНгЕФЫйЖШМАЦфПеЦјдЫЖЏЁЃ
ЖдгкФГаЉКИНггІгУЃЈЭЈГЃЪЧДѓаЭЛђИпЭЈСПгІгУЃЉЃЌАВзАдкЙьЕРЩЯЕФЕЅИіЛњЦїШЫПЩвджДааЖрИіЛњЦїШЫЕФЙЄзїЁЃР§ШчЃЌдкКИНгЯЕЭГжаЃЌЛњЦїШЫПЩвдАВзАдкЭЗЖЅЛђБъзМЕиАхЩЯЁЃетСНИібЁЯюЖМЬсЙЉСЫРЉеЙЙЄзїЗЖЮЇКЭЪЙЛњЦїШЫЕФЙиНкНгНќФбвдЕНДяЮЛжУЕФФмСІЃЌЭЌЪБЛЙдЪаэгУЛЇДІРэвдЧАашвЊЖрИіЛњЦїШЫЕФНЯДѓСуМўЁЃдкКИНгЯЕЭГжаЃЌБиаыПМТЧБЃЛЄТФДјЛњЙЙКЭЕчРТУтЪмЛ№ЛЈКЭШШКИЩСЙтЕФгАЯьЁЃGЈЙdelЙьЕРдЫЖЏФЃПщЕФЩшМЦВЩгУArmoloyЭПВувдМАвЛЬзЛЦЭЕМЙьЙЮАхЃЌетаЉЙЮАхгыGЈЙdelЙізгХфКЯЪЙгУЃЌПЩБЃГжЙиМќЕФЙьЕРзщМўЧхНрКЭЭъУРдЫааЃЌЖјАВзАдкЕчРТЧХМмКЭEСДЩЯЕФИЧзгПЩЗРжЙКИНгЛ№ЛЈКЭШШЩСЙтЫ№ЛЕНгЯпЁЃДЫЭтЃЌПМТЧНЋЛњЦїШЫПижЦЦїЃЌКИНгЕчдДКЭЕчЯпЙЬЖЈЦїАВзАдкгыЛњЦїШЫжЇМмЯрСЌЕФЕкЖўИіжЇМмЩЯЃЌЛђАВзАдкЮЊДЫЩшБИЩшМЦЕФМмзгЩЯЃЌвдЪЙЦфдкжДааЙЄзїЪБЫцЛњЦїШЫвЛЦ№вЦЖЏЁЃЭЈЙ§вЛаЉЯЕЭГМЦЛЎКЭе§ШЗЕФЩшБИЙцИёЃЌКИНгЖдгкGЈЙdelЙьЕРФЃПщЩЯЕФЛњЦїШЫРДЫЕЪЧЭъУРЕФгІгУЁЃЮоТлЪЧКИНгЛЙЪЧЦфЫћгІгУЃЌетаЉзщМўКЭЙІФмжаЕФаэЖрЖМЪЧЫљгаЯЕЭГЙВгаЕФЁЃПиМўЃЌЭЈаХЩшБИЃЌВйзїдБНчУцЃЌДЋИаЦїЃЌЭтЮЇЩшБИЃЌСуМўДІРэЩшБИЃЌЙЬЖЈзАжУЃЌАВШЋЙІФмКЭЕчРТЙмРэЩшБИЪЧЫљгаЛњЦїШЫЙЄзїЕЅдЊНтОіЗНАИжаЕФГЃМћзщМўЁЃ
ВЛПЩКіЪгЕФзщГЩВПЗжЃКШЫЁЃаэЖрЛњЦїШЫЙЄзїЕЅдЊШЮЮёЮоЗЈздЖЏЛЏЃЌР§ШчЯюФПЙмРэЃЌЯЕЭГЗТецКЭВМОжЃЌЯЕЭГПЊЗЂЃЌЩшМЦЃЌБрГЬЃЌИХФюбщжЄВтЪдКЭЯЕЭГФЃаЭЁЃ
СЫНтИќЖрABBЛњЦїШЫЃЌRSPПьЛЛХЬЃЌЧызЩбЏЃКABBЛњЦїШЫБЈОЏДњТы